[그림 1] Small 2025년 2월 후면 표지 논문
f
UV 빛
가시광선
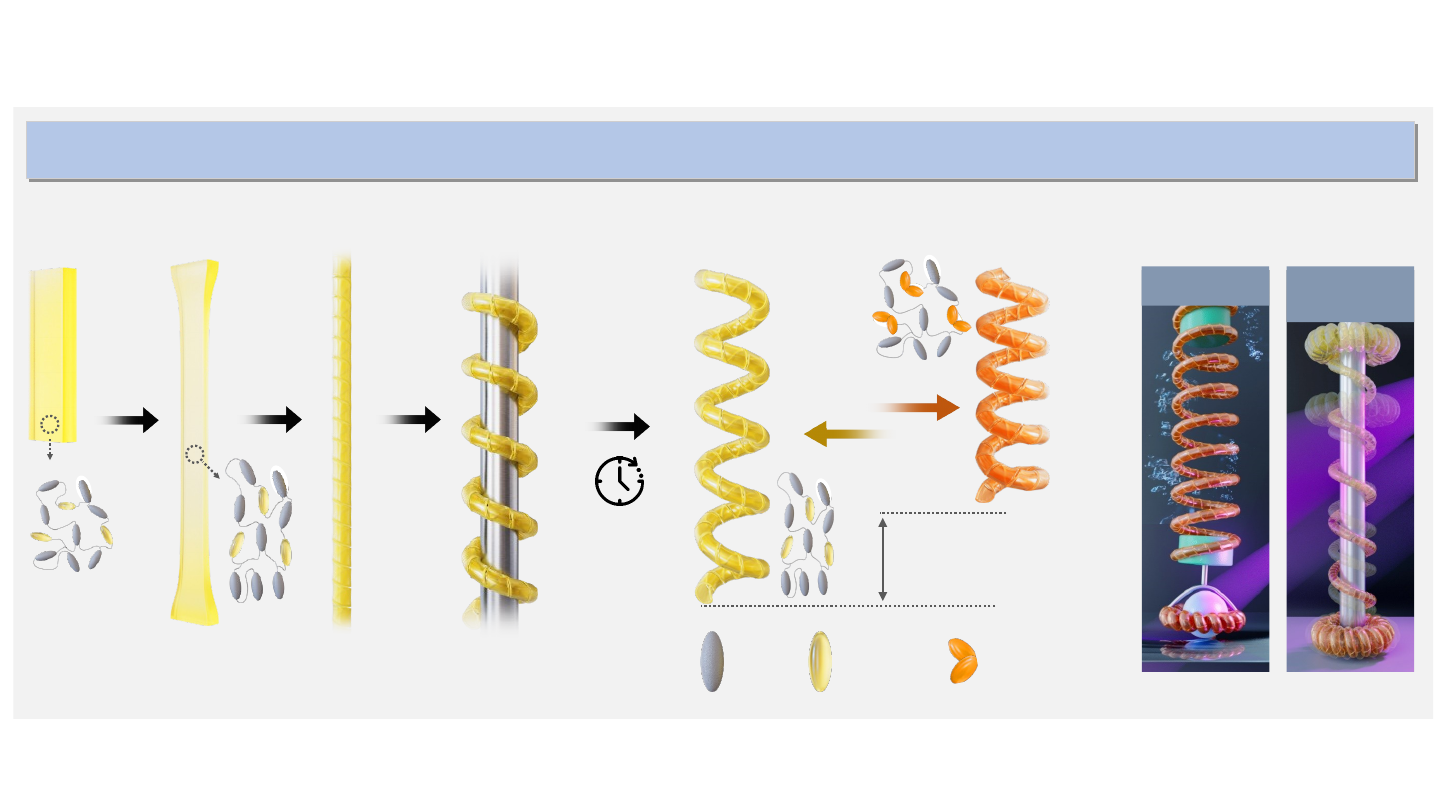
액정
메소젠
아조벤젠
-트랜스
아조벤젠
-시스
가역적
구동
인장
스프링
구조화
액정 탄성체
섬유
결정화 유도
액정 탄성체
스프링
액정 탄성체
필름
꼬임
그리퍼
파이프
크롤러
합성된
필름
단축
분자 정렬
결정성 액정 탄성체
인공근육
수중 소프트 로봇
구동기
[그림 2] 결정성 액정 탄성체 스프링 인공근육 연구 개괄도
수중 환경에서 포유류 근육보다 2배 이상의 구동 성능을 제공하는 인공근육 소재 및 공정 기술 개발
수중 환경에서 포유류 근육보다 2배 이상의 구동 성능을 제공하는 인공근육 소재 및 공정 기술 개
f
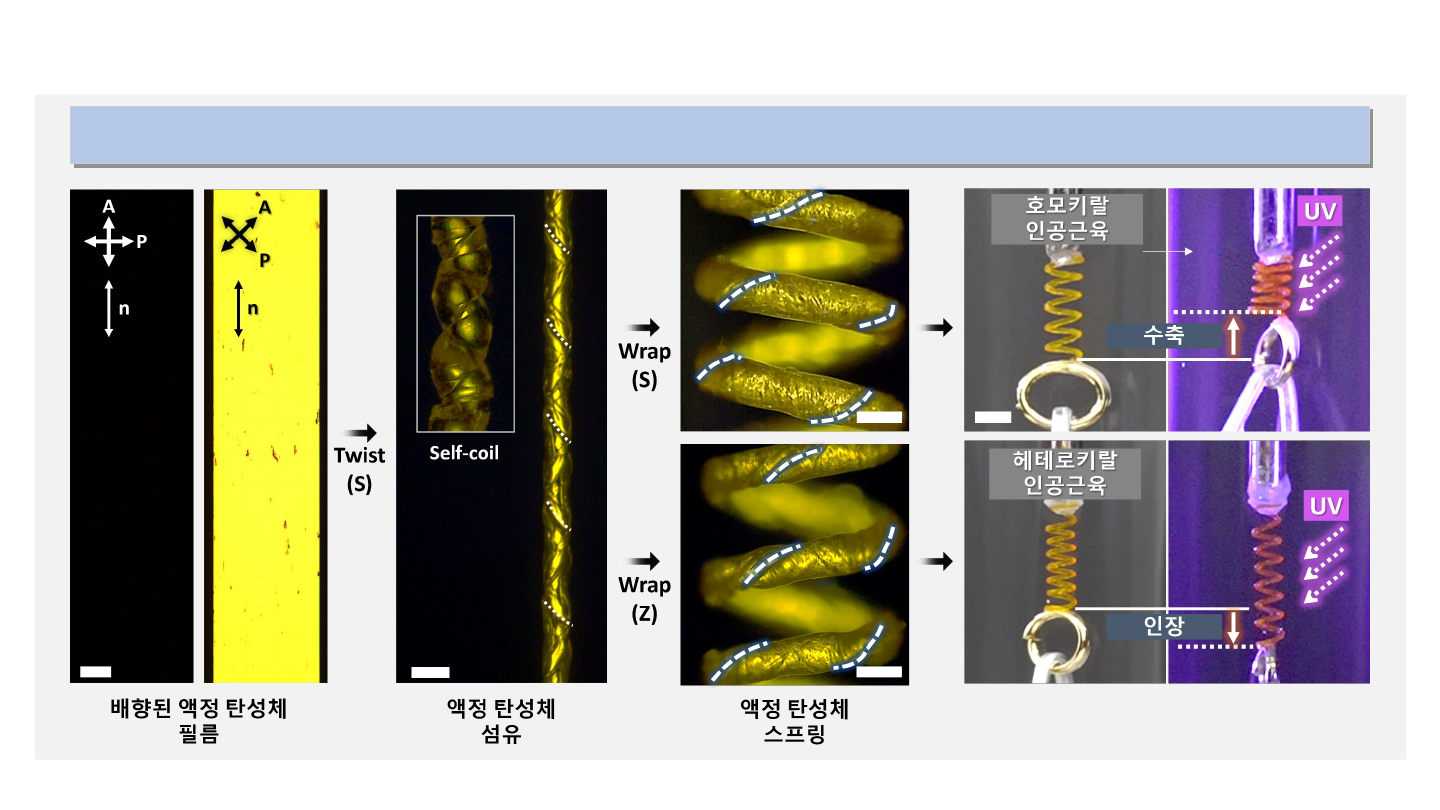
인공근육 스프링 구조화 (호모키랄, 헤테로키랄)에 따라, 동일 자극하 수축 또는 인장 컨트롤
인공근육 스프링 구조화 (호모키랄, 헤테로키랄)에 따라, 동일 자극하 수축 또는 인장 컨
[그림 3] 스프링 구조 설계에 기반한 구동 방향 컨트롤
f
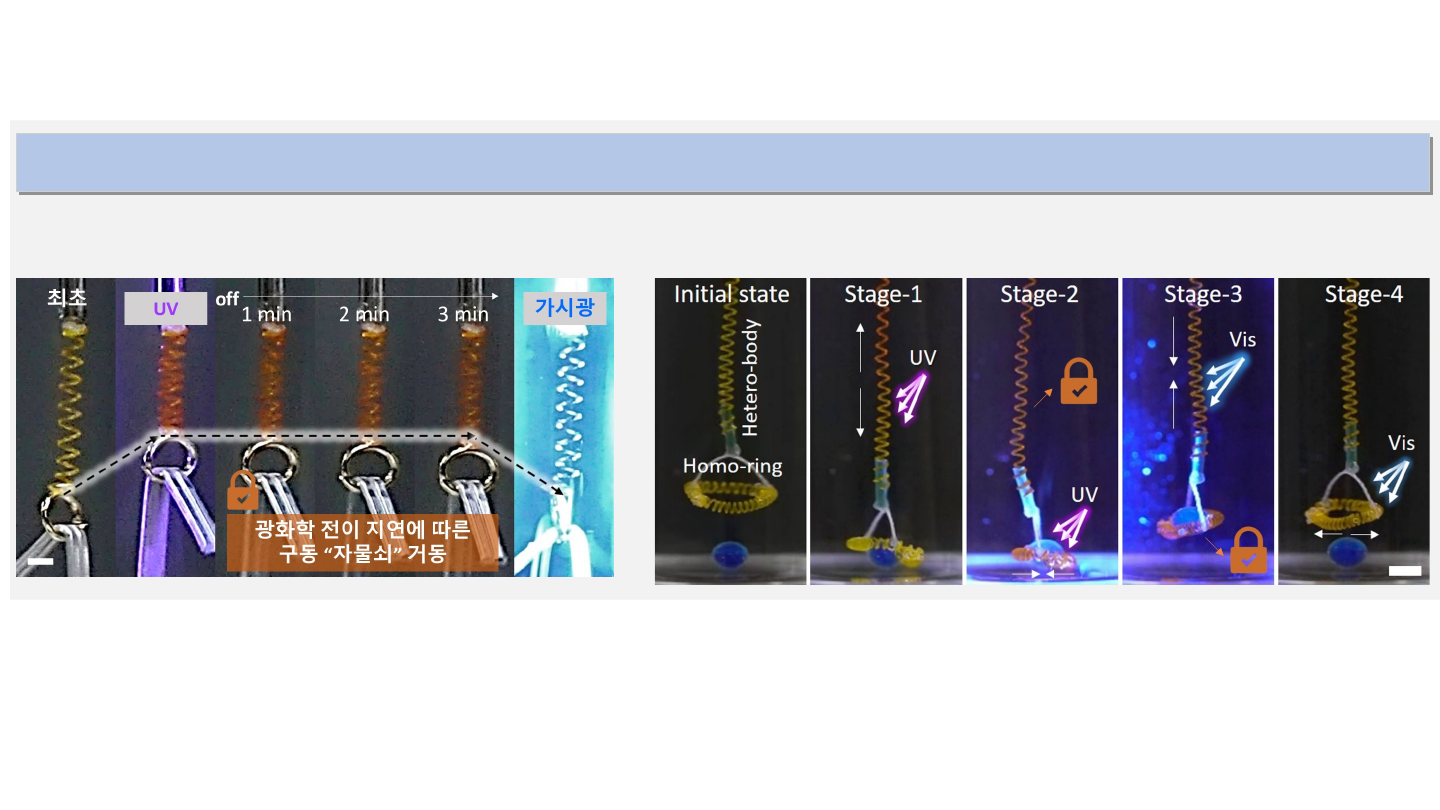
광화학 메커니즘을 활용한, 수중 소프트 로봇 그리퍼의
순차적 및 공간적 구동 컨트롤 구현
광화학 전이 지연에 따라,
빛을 꺼도 한동안 구동된 상태를 유지
구성 분자의 광화학 전이 메커니즘에 따라, 특유의 “구동 자물쇠“ 구현 및 소프트 로봇 거동 컨트롤
구성 분자의 광화학 전이 메커니즘에 따라, 특유의 “구동 자물쇠“ 구현 및 소프트 로봇 거동 컨
[그림 4] “구동 자물쇠“ 구현 및 빛에 의한 소프트 로봇의 순차적 공간적 구동 컨트롤

[그림 5] AC-LCE 소재로 만든 스프링 구조 인공 근육에 자외선을 비춰 동작을 유도하는 모습
[그림 6] 주요 연구진 사진 (왼쪽부터 화학연 김현 선임연구원(교신저자), 부산대 이하범 교수(교신저자), (미)
Texas A&M 대 Taylor H. Ware 교수(교신저자), 부산대 서원빈 학생 (1저자))
화학연
김현 선임연구원
(교신저자)
부산대
이하범 교수
(교신저자)
(미) Texas A&M 대
Taylor H. Ware 교수
(교신저자)
부산대
서원빈 학생
(1저자)

[영상 1] 결정성 액정 탄성체 스프링 인공근육의 수중 수축 (UV) 및 이완 (가시광선) 거동

[영상 2] 결정성 액정 탄성체 스프링 인공근육으로 구성된 수중 소프트 로봇 그리퍼
